foot.hh File Reference
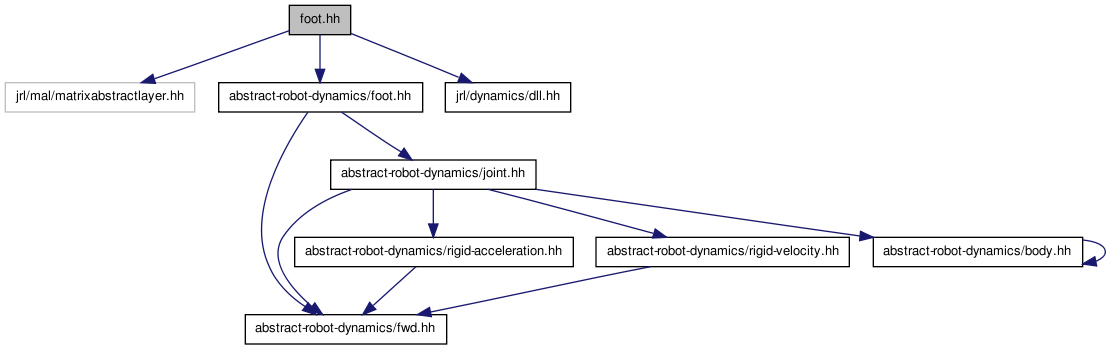
#include "jrl/mal/matrixabstractlayer.hh"#include "abstract-robot-dynamics/foot.hh"#include "jrl/dynamics/dll.hh"
Include dependency graph for foot.hh:
Classes | |
| class | dynamicsJRLJapan::Foot |
Namespaces | |
| namespace | dynamicsJRLJapan |