dynamicrobot.hh File Reference
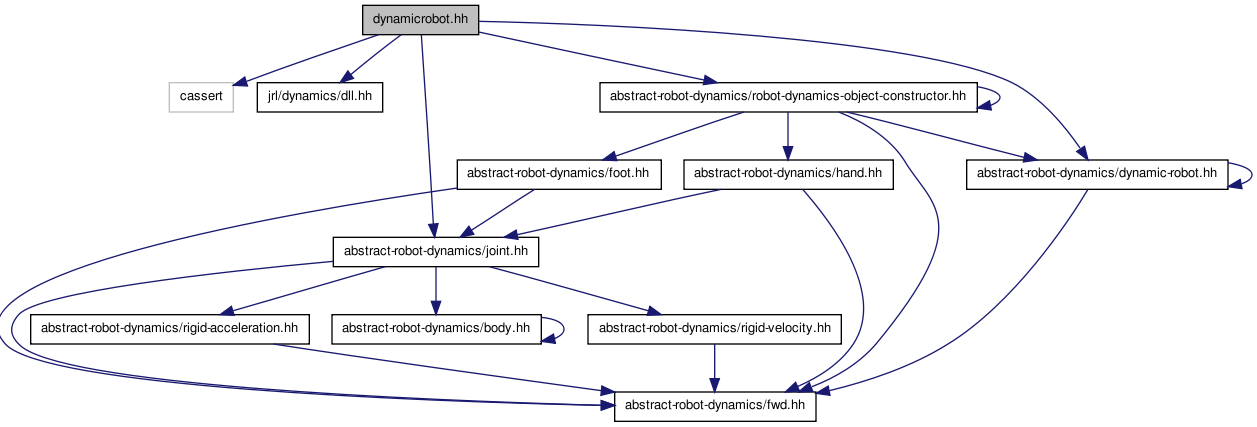
#include <cassert>#include <jrl/dynamics/dll.hh>#include <abstract-robot-dynamics/joint.hh>#include <abstract-robot-dynamics/dynamic-robot.hh>#include <abstract-robot-dynamics/robot-dynamics-object-constructor.hh>
Include dependency graph for dynamicrobot.hh:
This graph shows which files directly or indirectly include this file:
Classes | |
| class | jrlDelegate::dynamicRobot |
| Classes to implement a non abstract class for a robot with dynamic properties from an object factory. More... | |
Namespaces | |
| namespace | jrlDelegate |