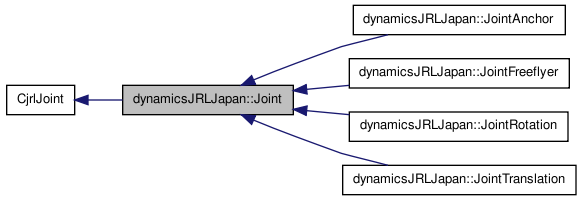
dynamicsJRLJapan::Joint Class Reference
[User Classes]
This class represents a robot joint. More...
#include <jrl/dynamics/joint.hh>
Public Member Functions | |
Joint name | |
| virtual const std::string & | getName () const |
| Get joint name. | |
| virtual void | setName (const std::string &name) |
| Set joint name. | |
Joint hierarchy | |
| virtual CjrlJoint * | parentJoint () const |
| Get a pointer to the parent joint (if any). | |
| virtual bool | addChildJoint (CjrlJoint &inJoint) |
| Add a child joint. | |
| virtual unsigned int | countChildJoints () const |
| Get the number of children. | |
| virtual CjrlJoint * | childJoint (unsigned int inJointRank) const |
| Returns the child joint at the given rank. | |
| virtual std::vector< CjrlJoint * > | jointsFromRootToThis () const |
| Get a vector containing references of the joints between the rootJoint and this joint. | |
| virtual unsigned int | rankInConfiguration () const |
| Get the rank of this joint in the robot configuration vector. | |
Joint kinematics | |
| virtual const matrix4d & | initialPosition () const |
| Get the initial position of the joint. | |
| virtual bool | updateTransformation (const vectorN &inDofVector) |
| Update this joint's transformation according to degree of freedom value from argument robot configuration. | |
| virtual const matrix4d & | currentTransformation () const |
| Get the current transformation of the joint. | |
| virtual CjrlRigidVelocity | jointVelocity () const |
Get the velocity  of the joint. of the joint. | |
| virtual CjrlRigidAcceleration | jointAcceleration () const |
| Get the acceleration of the joint. | |
| virtual unsigned int | numberDof () const |
| Get the number of degrees of freedom of the joint. | |
Bounds of the degrees of freedom | |
| virtual double | lowerBound (unsigned int inDofRank) const |
| Get the lower bound of a given degree of freedom of the joint. | |
| virtual double | upperBound (unsigned int inDofRank) const |
| Get the upper bound of a given degree of freedom of the joint. | |
| virtual void | lowerBound (unsigned int inDofRank, double inLowerBound) |
| Set the lower bound of a given degree of freedom of the joint. | |
| virtual void | upperBound (unsigned int inDofRank, double inUpperBound) |
| Set the upper bound of a given degree of freedom of the joint. | |
| virtual double | lowerVelocityBound (unsigned int inDofRank) const |
| Get the lower velocity bound of a given degree of freedom of the joint. | |
| virtual double | upperVelocityBound (unsigned int inDofRank) const |
| Get the upper veocity bound of a given degree of freedom of the joint. | |
| virtual void | lowerVelocityBound (unsigned int inDofRank, double inLowerBound) |
| Set the lower velocity bound of a given degree of freedom of the joint. | |
| virtual void | upperVelocityBound (unsigned int inDofRank, double inUpperBound) |
| Set the upper velocity bound of a given degree of freedom of the joint. | |
Jacobian functions wrt configuration. | |
| virtual const matrixNxP & | jacobianJointWrtConfig () const |
| Get the Jacobian matrix of the joint position and orientation wrt the robot configuration. | |
| virtual void | computeJacobianJointWrtConfig () |
| Compute the joint's jacobian wrt the robot configuration. | |
| virtual void | getJacobianPointWrtConfig (const vector3d &inPointJointFrame, matrixNxP &outjacobian) const |
| Get the jacobian of the point specified in local frame by inPointJointFrame. | |
Body linked to the joint | |
| virtual CjrlBody * | linkedBody () const |
| Get a pointer to the linked body (if any). | |
| virtual void | setLinkedBody (CjrlBody &inBody) |
| Link a body to the joint. | |
Public Attributes | |
| boost::shared_ptr< CjrlJoint > | m_privateObj |
Constructor and destructor | |
|
| |
| virtual | ~Joint () |
| Joint (const Joint &inJoint) | |
| Joint () | |
Detailed Description
This class represents a robot joint.
Implements abstract interface CjrlJoint.
Constructor & Destructor Documentation
| virtual dynamicsJRLJapan::Joint::~Joint | ( | ) | [inline, virtual] |
| dynamicsJRLJapan::Joint::Joint | ( | const Joint & | inJoint | ) |
| dynamicsJRLJapan::Joint::Joint | ( | ) | [protected] |
Member Function Documentation
| virtual bool dynamicsJRLJapan::Joint::addChildJoint | ( | CjrlJoint & | inJoint | ) | [virtual] |
Add a child joint.
Implements CjrlJoint.
| virtual CjrlJoint* dynamicsJRLJapan::Joint::childJoint | ( | unsigned int | inJointRank | ) | const [virtual] |
Returns the child joint at the given rank.
Implements CjrlJoint.
| virtual void dynamicsJRLJapan::Joint::computeJacobianJointWrtConfig | ( | ) | [virtual] |
Compute the joint's jacobian wrt the robot configuration.
Implements CjrlJoint.
| virtual unsigned int dynamicsJRLJapan::Joint::countChildJoints | ( | ) | const [virtual] |
Get the number of children.
Implements CjrlJoint.
| virtual const matrix4d& dynamicsJRLJapan::Joint::currentTransformation | ( | ) | const [virtual] |
Get the current transformation of the joint.
The current transformation of the joint is the transformation moving the joint from the position in initial configuration to the current position.
The current transformation is determined by the configuration  of the robot.
of the robot.
Implements CjrlJoint.
| virtual void dynamicsJRLJapan::Joint::getJacobianPointWrtConfig | ( | const vector3d & | inPointJointFrame, | |
| matrixNxP & | outjacobian | |||
| ) | const [virtual] |
Get the jacobian of the point specified in local frame by inPointJointFrame.
The output matrix outjacobian is automatically resized if necessary
Implements CjrlJoint.
| virtual const std::string& dynamicsJRLJapan::Joint::getName | ( | ) | const [virtual] |
Get joint name.
Implements CjrlJoint.
| virtual const matrix4d& dynamicsJRLJapan::Joint::initialPosition | ( | ) | const [virtual] |
Get the initial position of the joint.
The initial position of the joint is the position of the local frame of the joint.
Implements CjrlJoint.
| virtual const matrixNxP& dynamicsJRLJapan::Joint::jacobianJointWrtConfig | ( | ) | const [virtual] |
Get the Jacobian matrix of the joint position and orientation wrt the robot configuration.
Kinematical constraints from interaction with the environment are not taken into account for this computation.
The corresponding computation can be done by the robot for each of its joints or by the joint.
- Returns:
- a matrix
 defined by
defined by
where![\[ J = \left(\begin{array}{llll} {\bf v_1} & {\bf v_2} & \cdots & {\bf v_{n_{dof}}} \\ {\bf \omega_1} & {\bf \omega_2} & \cdots & {\bf \omega_{n_{dof}}} \end{array}\right) \]](form_12.png)
 and
and  are respectively the linear and angular velocities of the joint implied by the variation of degree of freedom
are respectively the linear and angular velocities of the joint implied by the variation of degree of freedom  . The velocity of the joint returned by CjrlJoint::jointVelocity can thus be obtained through the following formula:
. The velocity of the joint returned by CjrlJoint::jointVelocity can thus be obtained through the following formula: ![\[ \left(\begin{array}{l} {\bf v} \\ {\bf \omega}\end{array}\right) = J {\bf \dot{q}} \]](form_16.png)
Implements CjrlJoint.
| virtual CjrlRigidAcceleration dynamicsJRLJapan::Joint::jointAcceleration | ( | ) | const [virtual] |
Get the acceleration of the joint.
The acceleratoin is determined by the configuration of the robot and its first and second time derivative:  .
.
Implements CjrlJoint.
| virtual std::vector<CjrlJoint*> dynamicsJRLJapan::Joint::jointsFromRootToThis | ( | ) | const [virtual] |
| virtual CjrlRigidVelocity dynamicsJRLJapan::Joint::jointVelocity | ( | ) | const [virtual] |
Get the velocity of the joint.
The velocity is determined by the configuration of the robot and its time derivative:  .
.
- Returns:
- the linear velocity
 of the origin of the joint frame and the angular velocity
of the origin of the joint frame and the angular velocity  of the joint frame.
of the joint frame.
Implements CjrlJoint.
| virtual CjrlBody* dynamicsJRLJapan::Joint::linkedBody | ( | ) | const [virtual] |
Get a pointer to the linked body (if any).
Implements CjrlJoint.
| virtual void dynamicsJRLJapan::Joint::lowerBound | ( | unsigned int | inDofRank, | |
| double | inLowerBound | |||
| ) | [virtual] |
Set the lower bound of a given degree of freedom of the joint.
- Parameters:
-
inDofRank Id of the dof in the joint inLowerBound lower bound
Implements CjrlJoint.
| virtual double dynamicsJRLJapan::Joint::lowerBound | ( | unsigned int | inDofRank | ) | const [virtual] |
Get the lower bound of a given degree of freedom of the joint.
- Parameters:
-
inDofRank Id of the dof in the joint
Implements CjrlJoint.
| virtual void dynamicsJRLJapan::Joint::lowerVelocityBound | ( | unsigned int | inDofRank, | |
| double | inLowerBound | |||
| ) | [virtual] |
Set the lower velocity bound of a given degree of freedom of the joint.
- Parameters:
-
inDofRank Id of the dof in the joint inLowerBound lower bound
Implements CjrlJoint.
| virtual double dynamicsJRLJapan::Joint::lowerVelocityBound | ( | unsigned int | inDofRank | ) | const [virtual] |
Get the lower velocity bound of a given degree of freedom of the joint.
- Parameters:
-
inDofRank Id of the dof in the joint
Implements CjrlJoint.
| virtual unsigned int dynamicsJRLJapan::Joint::numberDof | ( | ) | const [virtual] |
Get the number of degrees of freedom of the joint.
Implements CjrlJoint.
| virtual CjrlJoint* dynamicsJRLJapan::Joint::parentJoint | ( | ) | const [virtual] |
Get a pointer to the parent joint (if any).
Implements CjrlJoint.
| virtual unsigned int dynamicsJRLJapan::Joint::rankInConfiguration | ( | ) | const [virtual] |
| virtual void dynamicsJRLJapan::Joint::setLinkedBody | ( | CjrlBody & | inBody | ) | [virtual] |
Link a body to the joint.
Implements CjrlJoint.
| virtual void dynamicsJRLJapan::Joint::setName | ( | const std::string & | name | ) | [virtual] |
Set joint name.
Implements CjrlJoint.
| virtual bool dynamicsJRLJapan::Joint::updateTransformation | ( | const vectorN & | inDofVector | ) | [virtual] |
Update this joint's transformation according to degree of freedom value from argument robot configuration.
This does not update the transformations of child joints.
- Parameters:
-
inDofVector is a robot configuration vector.
- Returns:
- false if argument vector's size is not equal to the robot's number of degrees of freedom
Implements CjrlJoint.
| virtual void dynamicsJRLJapan::Joint::upperBound | ( | unsigned int | inDofRank, | |
| double | inUpperBound | |||
| ) | [virtual] |
Set the upper bound of a given degree of freedom of the joint.
- Parameters:
-
inDofRank Id of the dof in the joint inUpperBound Upper bound.
Implements CjrlJoint.
| virtual double dynamicsJRLJapan::Joint::upperBound | ( | unsigned int | inDofRank | ) | const [virtual] |
Get the upper bound of a given degree of freedom of the joint.
- Parameters:
-
inDofRank Id of the dof in the joint
Implements CjrlJoint.
| virtual void dynamicsJRLJapan::Joint::upperVelocityBound | ( | unsigned int | inDofRank, | |
| double | inUpperBound | |||
| ) | [virtual] |
Set the upper velocity bound of a given degree of freedom of the joint.
- Parameters:
-
inDofRank Id of the dof in the joint inUpperBound Upper bound.
Implements CjrlJoint.
| virtual double dynamicsJRLJapan::Joint::upperVelocityBound | ( | unsigned int | inDofRank | ) | const [virtual] |
Get the upper veocity bound of a given degree of freedom of the joint.
- Parameters:
-
inDofRank Id of the dof in the joint
Implements CjrlJoint.
Member Data Documentation
| boost::shared_ptr<CjrlJoint> dynamicsJRLJapan::Joint::m_privateObj |