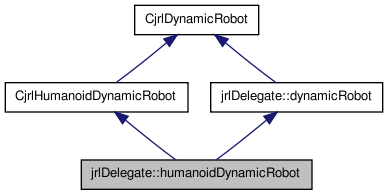
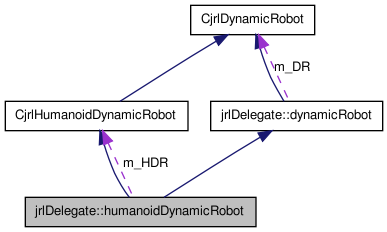
jrlDelegate::humanoidDynamicRobot Class Reference
[User Classes]
Template to implement a non abstract class describing a humanoid robot with dynamics. More...
#include <jrl/dynamics/humanoiddynamicrobot.hh>
Public Member Functions | |
| humanoidDynamicRobot (CjrlRobotDynamicsObjectFactory *inObjectFactory) | |
| humanoidDynamicRobot (humanoidDynamicRobot *inHDRNA) | |
| humanoidDynamicRobot () | |
| virtual | ~humanoidDynamicRobot () |
| Destructor. | |
Joints specific to humanoid robots | |
| virtual void | waist (CjrlJoint *inWaist) |
| Set the pointer to the waist. | |
| virtual CjrlJoint * | waist () const |
| Get a pointer to the waist. | |
| virtual void | chest (CjrlJoint *inChest) |
| Set the pointer to the chest. | |
| virtual CjrlJoint * | chest () const |
| Get a pointer to the chest. | |
| virtual void | leftWrist (CjrlJoint *inLeftWrist) |
| Set the pointer to the left wrist joint. | |
| virtual CjrlJoint * | leftWrist () const |
| Get a pointer to the left wrist. | |
| virtual void | rightWrist (CjrlJoint *inRightWrist) |
| Set the pointer to the right wrist joint. | |
| virtual CjrlJoint * | rightWrist () const |
| Get a pointer to the right wrist. | |
| virtual void | rightHand (CjrlHand *inRightHand) |
| Set the pointer to the right hand. | |
| virtual CjrlHand * | rightHand () const |
| Get a pointer to the right hand. | |
| virtual void | leftHand (CjrlHand *inLeftHand) |
| Set the pointer to the left hand. | |
| virtual CjrlHand * | leftHand () const |
| Get a pointer to the left hand. | |
| virtual double | getHandClench (CjrlHand *inHand) |
| Get the hand clench value. | |
| virtual bool | setHandClench (CjrlHand *inHand, double inClenchingValue) |
| Set the hand clench value. | |
| virtual void | leftAnkle (CjrlJoint *inLeftAnkle) |
| Set the pointer to the left ankle joint. | |
| virtual CjrlJoint * | leftAnkle () const |
| Get a pointer to the left ankle. | |
| virtual void | rightAnkle (CjrlJoint *inRightAnkle) |
| Set the pointer to the right ankle joint. | |
| virtual CjrlJoint * | rightAnkle () const |
| Get a pointer to the right ankle. | |
| virtual void | leftFoot (CjrlFoot *inLeftFoot) |
| Set the pointer to the left foot joint. | |
| virtual CjrlFoot * | leftFoot () const |
| Get a pointer to the left foot. | |
| virtual void | rightFoot (CjrlFoot *inRightFoot) |
| Set the pointer to the right foot joint. | |
| virtual CjrlFoot * | rightFoot () const |
| Get a pointer to the right foot. | |
| virtual void | gazeJoint (CjrlJoint *inGazeJoint) |
| Set gaze joint. | |
| virtual CjrlJoint * | gazeJoint () const |
| Get gaze joint. | |
| virtual void | gaze (const vector3d &inDirection, const vector3d &inOrigin) |
| Set the gaze orientation and position in the local frame of the gaze joint. | |
| virtual const vector3d & | gazeOrigin () const |
| Get a point on the gaze straight line. | |
| virtual const vector3d & | gazeDirection () const |
| Get the direction of gaze. | |
Zero momentum point | |
|
| |
| virtual const vector3d & | zeroMomentumPoint () const |
| return the coordinates of the Zero Momentum Point. | |
| int | dynamicsJRLJapan::parseOpenHRPVRMLFile (CjrlHumanoidDynamicRobot &ajrlHumanoidDynamicRobot, std::string &OpenHRPVRMLFile, std::string &MapJointToRankFileName, std::string &SpecificitiesFileName, std::vector< BodyGeometricalData > &VectorOfURLs, bool ReadGeometryInformation) |
Detailed Description
Template to implement a non abstract class describing a humanoid robot with dynamics.
This template takes a class implementing the methods of the template CjrlRobotDynamicsObjectConstructor.
Constructor & Destructor Documentation
| jrlDelegate::humanoidDynamicRobot::humanoidDynamicRobot | ( | CjrlRobotDynamicsObjectFactory * | inObjectFactory | ) | [inline] |
| jrlDelegate::humanoidDynamicRobot::humanoidDynamicRobot | ( | humanoidDynamicRobot * | inHDRNA | ) | [inline] |
| jrlDelegate::humanoidDynamicRobot::humanoidDynamicRobot | ( | ) | [inline] |
References jrlDelegate::dynamicRobot::setDynamicRobot().
| virtual jrlDelegate::humanoidDynamicRobot::~humanoidDynamicRobot | ( | ) | [inline, virtual] |
Destructor.
Member Function Documentation
| virtual CjrlJoint* jrlDelegate::humanoidDynamicRobot::chest | ( | ) | const [inline, virtual] |
Get a pointer to the chest.
- Note:
- for some humanoid robots, the waist and the chest are the same joints.
Implements CjrlHumanoidDynamicRobot.
References CjrlHumanoidDynamicRobot::chest().
| virtual void jrlDelegate::humanoidDynamicRobot::chest | ( | CjrlJoint * | inChest | ) | [inline, virtual] |
Set the pointer to the chest.
- Note:
- for some humanoid robots, the waist and the chest are the same joints.
Implements CjrlHumanoidDynamicRobot.
| virtual void jrlDelegate::humanoidDynamicRobot::gaze | ( | const vector3d & | inDirection, | |
| const vector3d & | inOrigin | |||
| ) | [inline, virtual] |
Set the gaze orientation and position in the local frame of the gaze joint.
- Returns:
- inOrigin a point on the gaze straight line,
- inDirection the direction of the gaze joint.
Implements CjrlHumanoidDynamicRobot.
References CjrlHumanoidDynamicRobot::gazeJoint().
| virtual const vector3d& jrlDelegate::humanoidDynamicRobot::gazeDirection | ( | ) | const [inline, virtual] |
Get the direction of gaze.
Implements CjrlHumanoidDynamicRobot.
| virtual CjrlJoint* jrlDelegate::humanoidDynamicRobot::gazeJoint | ( | ) | const [inline, virtual] |
Get gaze joint.
Implements CjrlHumanoidDynamicRobot.
| virtual void jrlDelegate::humanoidDynamicRobot::gazeJoint | ( | CjrlJoint * | inGazeJoint | ) | [inline, virtual] |
Set gaze joint.
- Note:
- For most humanoid robots, the gaze joint is the head.
Implements CjrlHumanoidDynamicRobot.
References CjrlHumanoidDynamicRobot::rightFoot().
| virtual const vector3d& jrlDelegate::humanoidDynamicRobot::gazeOrigin | ( | ) | const [inline, virtual] |
Get a point on the gaze straight line.
Implements CjrlHumanoidDynamicRobot.
References CjrlHumanoidDynamicRobot::gaze().
| virtual double jrlDelegate::humanoidDynamicRobot::getHandClench | ( | CjrlHand * | inHand | ) | [inline, virtual] |
Get the hand clench value.
This is a scalar value ranging between 0 and 1 which describes the hand clench (0 for open and 1 for closed hand)
Implements CjrlHumanoidDynamicRobot.
| virtual CjrlJoint* jrlDelegate::humanoidDynamicRobot::leftAnkle | ( | ) | const [inline, virtual] |
Get a pointer to the left ankle.
Implements CjrlHumanoidDynamicRobot.
| virtual void jrlDelegate::humanoidDynamicRobot::leftAnkle | ( | CjrlJoint * | inLeftAnkle | ) | [inline, virtual] |
Set the pointer to the left ankle joint.
Implements CjrlHumanoidDynamicRobot.
| virtual CjrlFoot* jrlDelegate::humanoidDynamicRobot::leftFoot | ( | ) | const [inline, virtual] |
Get a pointer to the left foot.
Implements CjrlHumanoidDynamicRobot.
| virtual void jrlDelegate::humanoidDynamicRobot::leftFoot | ( | CjrlFoot * | inLeftFoot | ) | [inline, virtual] |
Set the pointer to the left foot joint.
Implements CjrlHumanoidDynamicRobot.
| virtual CjrlHand* jrlDelegate::humanoidDynamicRobot::leftHand | ( | ) | const [inline, virtual] |
Get a pointer to the left hand.
Implements CjrlHumanoidDynamicRobot.
| virtual void jrlDelegate::humanoidDynamicRobot::leftHand | ( | CjrlHand * | inLeftHand | ) | [inline, virtual] |
Set the pointer to the left hand.
Implements CjrlHumanoidDynamicRobot.
| virtual CjrlJoint* jrlDelegate::humanoidDynamicRobot::leftWrist | ( | ) | const [inline, virtual] |
Get a pointer to the left wrist.
Implements CjrlHumanoidDynamicRobot.
| virtual void jrlDelegate::humanoidDynamicRobot::leftWrist | ( | CjrlJoint * | inLeftWrist | ) | [inline, virtual] |
Set the pointer to the left wrist joint.
Implements CjrlHumanoidDynamicRobot.
| virtual CjrlJoint* jrlDelegate::humanoidDynamicRobot::rightAnkle | ( | ) | const [inline, virtual] |
Get a pointer to the right ankle.
Implements CjrlHumanoidDynamicRobot.
| virtual void jrlDelegate::humanoidDynamicRobot::rightAnkle | ( | CjrlJoint * | inRightAnkle | ) | [inline, virtual] |
Set the pointer to the right ankle joint.
Implements CjrlHumanoidDynamicRobot.
| virtual CjrlFoot* jrlDelegate::humanoidDynamicRobot::rightFoot | ( | ) | const [inline, virtual] |
Get a pointer to the right foot.
Implements CjrlHumanoidDynamicRobot.
| virtual void jrlDelegate::humanoidDynamicRobot::rightFoot | ( | CjrlFoot * | inRightFoot | ) | [inline, virtual] |
Set the pointer to the right foot joint.
Implements CjrlHumanoidDynamicRobot.
| virtual CjrlHand* jrlDelegate::humanoidDynamicRobot::rightHand | ( | ) | const [inline, virtual] |
Get a pointer to the right hand.
Implements CjrlHumanoidDynamicRobot.
| virtual void jrlDelegate::humanoidDynamicRobot::rightHand | ( | CjrlHand * | inRightHand | ) | [inline, virtual] |
Set the pointer to the right hand.
Implements CjrlHumanoidDynamicRobot.
| virtual CjrlJoint* jrlDelegate::humanoidDynamicRobot::rightWrist | ( | ) | const [inline, virtual] |
Get a pointer to the right wrist.
Implements CjrlHumanoidDynamicRobot.
| virtual void jrlDelegate::humanoidDynamicRobot::rightWrist | ( | CjrlJoint * | inRightWrist | ) | [inline, virtual] |
Set the pointer to the right wrist joint.
Implements CjrlHumanoidDynamicRobot.
| virtual bool jrlDelegate::humanoidDynamicRobot::setHandClench | ( | CjrlHand * | inHand, | |
| double | inClenchingValue | |||
| ) | [inline, virtual] |
Set the hand clench value.
This is a scalar value ranging between 0 and 1 which describes the hand clench (0 for open and 1 for closed hand)
- Returns:
- false if parameter 2 is out of range
Implements CjrlHumanoidDynamicRobot.
| virtual CjrlJoint* jrlDelegate::humanoidDynamicRobot::waist | ( | ) | const [inline, virtual] |
Get a pointer to the waist.
Implements CjrlHumanoidDynamicRobot.
References CjrlHumanoidDynamicRobot::waist().
| virtual void jrlDelegate::humanoidDynamicRobot::waist | ( | CjrlJoint * | inWaist | ) | [inline, virtual] |
Set the pointer to the waist.
Implements CjrlHumanoidDynamicRobot.
| virtual const vector3d& jrlDelegate::humanoidDynamicRobot::zeroMomentumPoint | ( | ) | const [inline, virtual] |
return the coordinates of the Zero Momentum Point.
Implements CjrlHumanoidDynamicRobot.
Friends And Related Function Documentation
| int dynamicsJRLJapan::parseOpenHRPVRMLFile | ( | CjrlHumanoidDynamicRobot & | ajrlHumanoidDynamicRobot, | |
| std::string & | OpenHRPVRMLFile, | |||
| std::string & | MapJointToRankFileName, | |||
| std::string & | SpecificitiesFileName, | |||
| std::vector< BodyGeometricalData > & | VectorOfURLs, | |||
| bool | ReadGeometryInformation | |||
| ) | [friend] |