#include <tvm/geometry/Plane.h>
Public Member Functions | |
| Plane (const Eigen::Vector3d &normal, double offset) | |
| Plane (const Eigen::Vector3d &normal, const Eigen::Vector3d &point) | |
| template<typename S , typename EnumO > | |
| void | setIntegrator (std::shared_ptr< S > integrator, EnumO oPosition, EnumO oVelocity, EnumO oAcceleration) |
| template<typename S , typename EnumO , typename std::enable_if< std::is_base_of< tvm::graph::abstract::Outputs, S >::value, int >::type = 0> | |
| void | setIntegrator (S &integrator, EnumO oPosition, EnumO oVelocity, EnumO oAcceleration) |
| void | position (const Eigen::Vector3d &normal, const Eigen::Vector3d &point) |
| void | position (const Eigen::Vector3d &normal, double offset) |
| void | velocity (const Eigen::Vector3d &nDot, const Eigen::Vector3d &speed) |
| void | acceleration (const Eigen::Vector3d &nDotDot, const Eigen::Vector3d &accel) |
| const Eigen::Vector3d & | normal () const |
| double | offset () const |
| const Eigen::Vector3d & | point () const |
| const Eigen::Vector3d & | normalDot () const |
| const Eigen::Vector3d & | speed () const |
| const Eigen::Vector3d & | normalDotDot () const |
| const Eigen::Vector3d & | acceleration () const |
 Public Member Functions inherited from tvm::graph::internal::AbstractNode Public Member Functions inherited from tvm::graph::internal::AbstractNode | |
| template<typename EnumT > | |
| bool | isUpdateEnabled (EnumT e) const |
| virtual bool | isUpdateStaticallyEnabled (int) const |
| virtual bool | isUpdateCustomEnabled (int) const |
| virtual | ~AbstractNode ()=default |
| void | update (int i) |
| Public Member Functions inherited from tvm::graph::internal::Inputs | |
| virtual | ~Inputs ()=default |
| template<typename T , typename EnumI , typename... Args> | |
| void | addInput (std::shared_ptr< T > source, EnumI i, Args... args) |
| template<typename T , typename EnumI , typename... Args, typename std::enable_if< std::is_base_of< abstract::Outputs, T >::value, int >::type = 0> | |
| void | addInput (T &source, EnumI i, Args... args) |
| template<typename T > | |
| void | removeInput (T *source) |
| template<typename T , typename... Args> | |
| void | removeInput (T *source, Args... args) |
| template<typename T > | |
| Iterator | getInput (T *source) |
| template<typename T > | |
| Iterator | getInput (const std::shared_ptr< T > &source) |
| Public Member Functions inherited from tvm::graph::abstract::Outputs | |
| virtual | ~Outputs ()=default |
| template<typename EnumT > | |
| bool | isOutputEnabled (EnumT e) const |
| bool | isOutputEnabled (int i) const |
| virtual bool | isOutputStaticallyEnabled (int) const |
| virtual bool | isOutputCustomEnabled (int) const |
Additional Inherited Members | |
| Public Types inherited from tvm::graph::internal::AbstractNode | |
| enum class | Update_ |
| using | UpdateParent = AbstractNode |
| using | UpdateBase = AbstractNode |
| Public Types inherited from tvm::graph::internal::Inputs | |
| using | inputs_t = std::unordered_map< abstract::Outputs *, std::set< int > > |
| using | store_t = std::unordered_set< std::shared_ptr< abstract::Outputs > > |
| Public Types inherited from tvm::graph::abstract::Outputs | |
| enum class | Output_ |
| using | OutputParent = Outputs |
| using | OutputBase = Outputs |
| Static Public Member Functions inherited from tvm::graph::internal::AbstractNode | |
| static constexpr const char * | UpdateName (Update_) |
| template<typename EnumT > | |
| static constexpr bool | UpdateStaticallyEnabled (EnumT) |
| Static Public Member Functions inherited from tvm::graph::abstract::Outputs | |
| static constexpr const char * | OutputName (Output_) |
| template<typename EnumT > | |
| static constexpr bool | OutputStaticallyEnabled (EnumT) |
| Static Public Attributes inherited from tvm::graph::internal::AbstractNode | |
| static constexpr unsigned int | UpdateSize = 0 |
| static constexpr auto | UpdateBaseName = "AbstractNode" |
| Static Public Attributes inherited from tvm::graph::abstract::Outputs | |
| static constexpr unsigned int | OutputSize = 0 |
| static constexpr auto | OutputBaseName = "Outputs" |
| Protected Types inherited from tvm::graph::internal::AbstractNode | |
| using | input_dependency_t = std::map< Outputs *, std::set< int > > |
| Protected Member Functions inherited from tvm::graph::abstract::Node< Plane > | |
| void | registerUpdates (EnumT u, void(U::*fn)(), Args... args) |
| void | registerUpdates (EnumT u, void(U::*fn)()) |
| void | addOutputDependency (EnumO o, EnumU u) |
| void | addOutputDependency (std::initializer_list< EnumO > os, EnumU u) |
| void | addInternalDependency (EnumU1 uDependent, EnumU2 u) |
| void | addInputDependency (EnumU u, std::shared_ptr< S > source, EnumO i, Args... args) |
| void | addInputDependency (EnumU u, S &source, EnumO i, Args... args) |
| void | addDirectDependency (EnumO o, std::shared_ptr< S > source, EnumI i) |
| void | addDirectDependency (EnumO o, S &source, EnumI i) |
| Protected Attributes inherited from tvm::graph::internal::AbstractNode | |
| std::map< int, std::function< void(AbstractNode &)> > | updates_ |
| std::map< int, std::vector< int > > | outputDependencies_ |
| std::map< int, std::vector< int > > | internalDependencies_ |
| std::map< int, input_dependency_t > | inputDependencies_ |
| std::map< int, std::pair< Outputs *, int > > | directDependencies_ |
| Protected Attributes inherited from tvm::graph::abstract::Outputs | |
| bool | is_node_ = false |
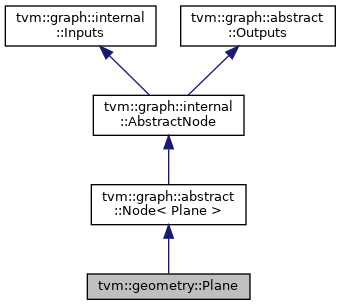
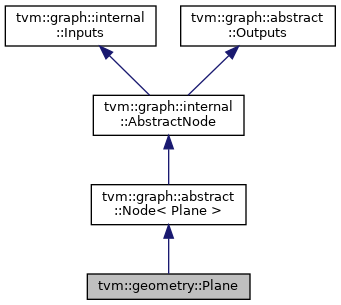
Detailed Description
Represents a 2D plane in 3D space
A static plane is represented by the usual (normal, offset) representation. (i.e. normal.dot(x) + offset = 0)
A moving plane is represented by a (normal, point) couple and their derivatives. (i.e. normal.dot(point) = -offset)
This object does not update any of these quantities (exception: when point is changed, offset is changed accordingly), this responsibility belongs to the Plane provider. In other words, this is not a plane integrator.
Outputs:
- Position: position of the plane, represents (normal, offset, point) quantities
- Velocity: first derivative of (normal, point)
- Acceleration: second derivative of (normal, point)
Constructor & Destructor Documentation
◆ Plane() [1/2]
| tvm::geometry::Plane::Plane | ( | const Eigen::Vector3d & | normal, |
| double | offset | ||
| ) |
Constructor for a static plane
- Parameters
-
normal Normal of the plane offset Offset of the plane
◆ Plane() [2/2]
| tvm::geometry::Plane::Plane | ( | const Eigen::Vector3d & | normal, |
| const Eigen::Vector3d & | point | ||
| ) |
Constructor for a moving plane
- Parameters
-
normal Normal of the plane point Point on the plane
Member Function Documentation
◆ acceleration() [1/2]
|
inline |
Access the point's acceleration
◆ acceleration() [2/2]
| void tvm::geometry::Plane::acceleration | ( | const Eigen::Vector3d & | nDotDot, |
| const Eigen::Vector3d & | accel | ||
| ) |
Change the point and normal's acceleration
◆ normal()
|
inline |
Access the normal
◆ normalDot()
|
inline |
Access the normal derivative
◆ normalDotDot()
|
inline |
Access the normal second derivative
◆ offset()
|
inline |
Access the offset
◆ point()
|
inline |
Access the point
◆ position() [1/2]
| void tvm::geometry::Plane::position | ( | const Eigen::Vector3d & | normal, |
| const Eigen::Vector3d & | point | ||
| ) |
Change the plane normal and point
Triggers offset computation
◆ position() [2/2]
| void tvm::geometry::Plane::position | ( | const Eigen::Vector3d & | normal, |
| double | offset | ||
| ) |
Change the plane normal and offset
◆ setIntegrator() [1/2]
|
inline |
Set a direct dependency to the outputs of the integrator
This variant is probably preferable if the integrator creates the plane object
Such an integrator should update the plane in its own update method
◆ setIntegrator() [2/2]
|
inline |
Set a direct dependency to the outputs of the integrator
Such an integrator should update the plane in its own update method
◆ speed()
|
inline |
Access the point's speed
◆ velocity()
| void tvm::geometry::Plane::velocity | ( | const Eigen::Vector3d & | nDot, |
| const Eigen::Vector3d & | speed | ||
| ) |
Change the point and normal's speeds
The documentation for this class was generated from the following file:
- include/tvm/geometry/Plane.h
