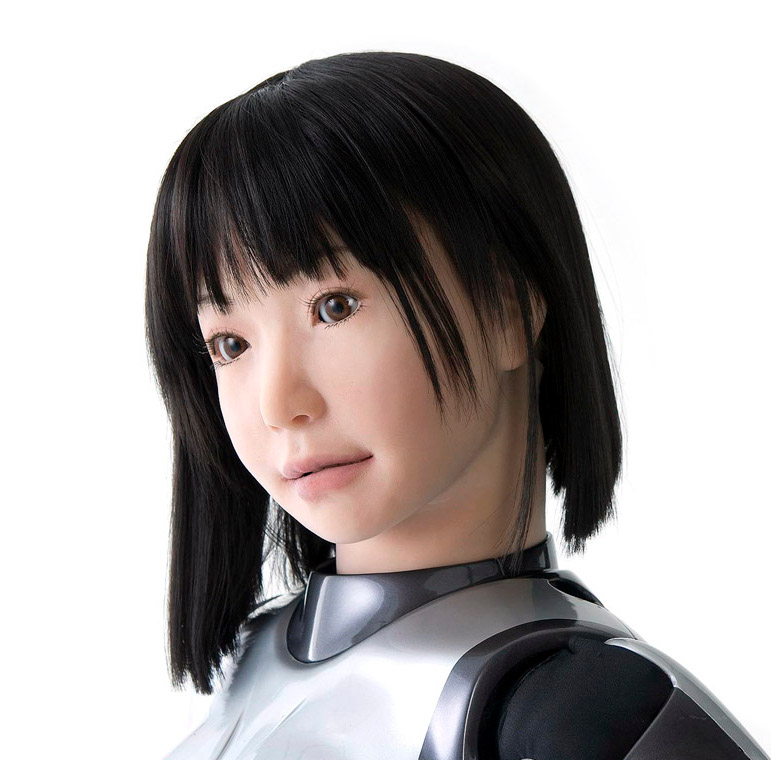
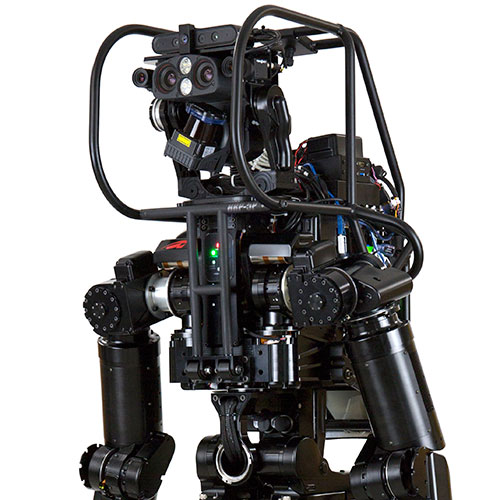
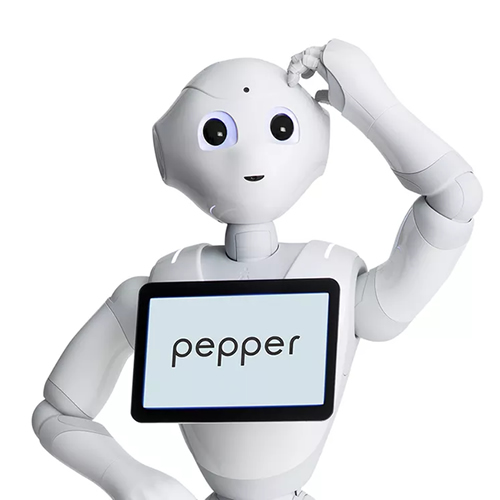
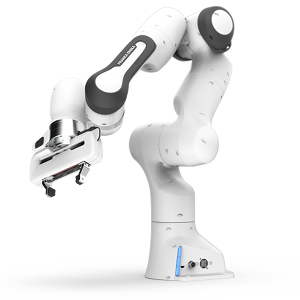
このページでは、mc_rtcで現在利用可能なロボットのほか、それらのロボットに関するロボット記述パッケージやロボットモジュールパッケージのリポジトリへのリンクの一覧を示します。なお、場合によってはアクセス権を請求する必要があります。










URDFファイルがあれば開始できます。詳細についてはこちらの チュートリアルを参照してください。