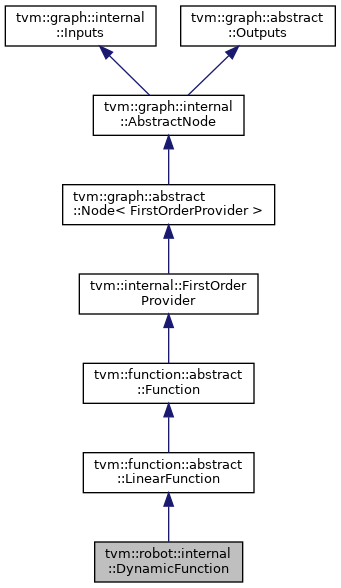
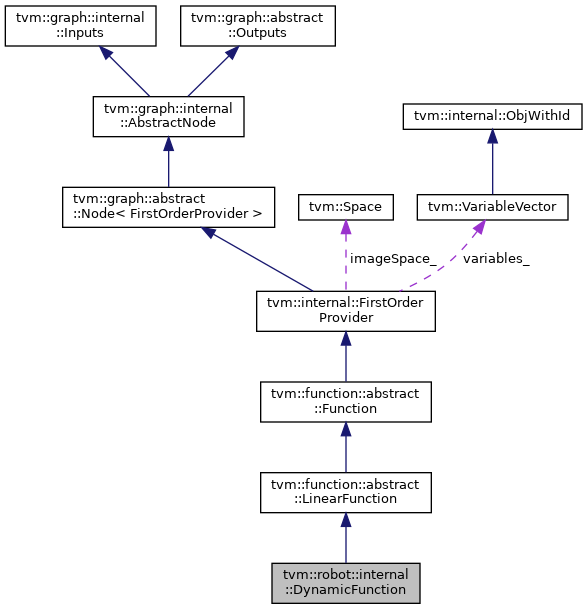
#include <tvm/robot/internal/DynamicFunction.h>
Classes | |
| struct | ForceContact |
Public Types | |
| using | Output = function::abstract::LinearFunction::Output |
 Public Types inherited from tvm::graph::internal::AbstractNode Public Types inherited from tvm::graph::internal::AbstractNode | |
| enum class | Update_ |
| using | UpdateParent = AbstractNode |
| using | UpdateBase = AbstractNode |
| Public Types inherited from tvm::graph::internal::Inputs | |
| using | inputs_t = std::unordered_map< abstract::Outputs *, std::set< int > > |
| using | store_t = std::unordered_set< std::shared_ptr< abstract::Outputs > > |
| Public Types inherited from tvm::graph::abstract::Outputs | |
| enum class | Output_ |
| using | OutputParent = Outputs |
| using | OutputBase = Outputs |
Public Member Functions | |
| DynamicFunction (RobotPtr robot) | |
| bool | addContact (ContactPtr contact, bool linearize, double mu, unsigned int nrGen) |
| void | removeContact (const Contact::Id &id) |
| sva::ForceVecd | contactForce (const Contact::Id &id) const |
| void | addPositiveLambdaToProblem (ControlProblem &problem) |
| Public Member Functions inherited from tvm::function::abstract::LinearFunction | |
| void | updateValue () |
| void | updateVelocity () |
| void | resizeCache () override |
| const tvm::internal::VectorWithProperties & | b () const |
| Public Member Functions inherited from tvm::function::abstract::Function | |
| virtual const Eigen::VectorXd & | velocity () const |
| virtual const Eigen::VectorXd & | normalAcceleration () const |
| virtual MatrixConstRef | JDot (const Variable &x) const |
| Public Member Functions inherited from tvm::internal::FirstOrderProvider | |
| virtual const Eigen::VectorXd & | value () const |
| virtual MatrixConstRefWithProperties | jacobian (const Variable &x) const |
| bool | linearIn (const Variable &x) const |
| const Space & | imageSpace () const |
| int | size () const |
| int | rSize () const |
| int | tSize () const |
| const VariableVector & | variables () const |
| Public Member Functions inherited from tvm::graph::internal::AbstractNode | |
| template<typename EnumT > | |
| bool | isUpdateEnabled (EnumT e) const |
| virtual bool | isUpdateStaticallyEnabled (int) const |
| virtual bool | isUpdateCustomEnabled (int) const |
| virtual | ~AbstractNode ()=default |
| void | update (int i) |
| Public Member Functions inherited from tvm::graph::internal::Inputs | |
| virtual | ~Inputs ()=default |
| template<typename T , typename EnumI , typename... Args> | |
| void | addInput (std::shared_ptr< T > source, EnumI i, Args... args) |
| template<typename T , typename EnumI , typename... Args, typename std::enable_if< std::is_base_of< abstract::Outputs, T >::value, int >::type = 0> | |
| void | addInput (T &source, EnumI i, Args... args) |
| template<typename T > | |
| void | removeInput (T *source) |
| template<typename T , typename... Args> | |
| void | removeInput (T *source, Args... args) |
| template<typename T > | |
| Iterator | getInput (T *source) |
| template<typename T > | |
| Iterator | getInput (const std::shared_ptr< T > &source) |
| Public Member Functions inherited from tvm::graph::abstract::Outputs | |
| virtual | ~Outputs ()=default |
| template<typename EnumT > | |
| bool | isOutputEnabled (EnumT e) const |
| bool | isOutputEnabled (int i) const |
| virtual bool | isOutputStaticallyEnabled (int) const |
| virtual bool | isOutputCustomEnabled (int) const |
Protected Member Functions | |
| void | updateb () |
| void | updateJacobian () |
| void | addContact_ (const Contact::View &contact, bool linearize, double mu, unsigned int nrGen, double dir) |
| std::vector< ForceContact >::iterator | getContact (const Contact::Id &id) |
| std::vector< ForceContact >::const_iterator | getContact (const Contact::Id &id) const |
| Protected Member Functions inherited from tvm::function::abstract::LinearFunction | |
| LinearFunction (int m) | |
| virtual void | updateValue_ () |
| virtual void | updateVelocity_ () |
| void | setDerivativesToZero () |
| Protected Member Functions inherited from tvm::function::abstract::Function | |
| Function (int m=0) | |
| Function (Space image) | |
| void | resizeVelocityCache () |
| void | resizeNormalAccelerationCache () |
| void | resizeJDotCache () |
| void | addVariable_ (VariablePtr v) override |
| void | removeVariable_ (VariablePtr v) override |
| Protected Member Functions inherited from tvm::internal::FirstOrderProvider | |
| FirstOrderProvider (int m) | |
| FirstOrderProvider (Space image) | |
| void | resizeValueCache () |
| void | resizeJacobianCache () |
| void | addVariable (VariablePtr v, bool linear) |
| void | removeVariable (VariablePtr v) |
| void | addVariable (const VariableVector &v, bool linear) |
| void | splitJacobian (const MatrixConstRef &J, const std::vector< VariablePtr > &vars, bool keepProperties=false) |
| void | splitJacobian (const MatrixConstRef &J, const VariableVector &vars, bool keepProperties=false) |
| void | resize (int m) |
| Protected Member Functions inherited from tvm::graph::abstract::Node< FirstOrderProvider > | |
| void | registerUpdates (EnumT u, void(U::*fn)(), Args... args) |
| void | registerUpdates (EnumT u, void(U::*fn)()) |
| void | addOutputDependency (EnumO o, EnumU u) |
| void | addOutputDependency (std::initializer_list< EnumO > os, EnumU u) |
| void | addInternalDependency (EnumU1 uDependent, EnumU2 u) |
| void | addInputDependency (EnumU u, std::shared_ptr< S > source, EnumO i, Args... args) |
| void | addInputDependency (EnumU u, S &source, EnumO i, Args... args) |
| void | addDirectDependency (EnumO o, std::shared_ptr< S > source, EnumI i) |
| void | addDirectDependency (EnumO o, S &source, EnumI i) |
Protected Attributes | |
| RobotPtr | robot_ |
| std::vector< ForceContact > | contacts_ |
| Protected Attributes inherited from tvm::function::abstract::LinearFunction | |
| tvm::internal::VectorWithProperties | b_ |
| Protected Attributes inherited from tvm::function::abstract::Function | |
| Eigen::VectorXd | velocity_ |
| Eigen::VectorXd | normalAcceleration_ |
| utils::internal::MapWithVariableAsKey< Eigen::MatrixXd, slice_jdot > | JDot_ |
| Protected Attributes inherited from tvm::internal::FirstOrderProvider | |
| Eigen::VectorXd | value_ |
| utils::internal::MapWithVariableAsKey< MatrixWithProperties, slice_matrix, true > | jacobian_ |
| Space | imageSpace_ |
| VariableVector | variables_ |
| utils::internal::MapWithVariableAsKey< bool, slice_linear > | linear_ |
| Protected Attributes inherited from tvm::graph::internal::AbstractNode | |
| std::map< int, std::function< void(AbstractNode &)> > | updates_ |
| std::map< int, std::vector< int > > | outputDependencies_ |
| std::map< int, std::vector< int > > | internalDependencies_ |
| std::map< int, input_dependency_t > | inputDependencies_ |
| std::map< int, std::pair< Outputs *, int > > | directDependencies_ |
| Protected Attributes inherited from tvm::graph::abstract::Outputs | |
| bool | is_node_ = false |
Additional Inherited Members | |
| Static Public Member Functions inherited from tvm::graph::internal::AbstractNode | |
| static constexpr const char * | UpdateName (Update_) |
| template<typename EnumT > | |
| static constexpr bool | UpdateStaticallyEnabled (EnumT) |
| Static Public Member Functions inherited from tvm::graph::abstract::Outputs | |
| static constexpr const char * | OutputName (Output_) |
| template<typename EnumT > | |
| static constexpr bool | OutputStaticallyEnabled (EnumT) |
| Static Public Attributes inherited from tvm::graph::internal::AbstractNode | |
| static constexpr unsigned int | UpdateSize = 0 |
| static constexpr auto | UpdateBaseName = "AbstractNode" |
| Static Public Attributes inherited from tvm::graph::abstract::Outputs | |
| static constexpr unsigned int | OutputSize = 0 |
| static constexpr auto | OutputBaseName = "Outputs" |
| Protected Types inherited from tvm::graph::internal::AbstractNode | |
| using | input_dependency_t = std::map< Outputs *, std::set< int > > |
Detailed Description
Implement the equation of motion for a given robot.
It can be given contacts that will be integrated into the equation of motion (
- See also
- DynamicFunction::addContact) or contacts that will be removed from the equation (
- DynamicFunction::removeContact).
It manages the force variables related to these contacts.
It also takes care of linearizing the contacts, either by having them in a linearized form in the solver (lambdas) or as forces. The related constraint (mu*f_n >= ||f_t||) can be added to the problem through this function.
Notably, it does not take care of enforcing Newton 3rd law of motion when two actuated robots are in contact.
Member Typedef Documentation
◆ Output
Constructor & Destructor Documentation
◆ DynamicFunction()
| tvm::robot::internal::DynamicFunction::DynamicFunction | ( | RobotPtr | robot | ) |
Construct the equation of motion for a given robot
Member Function Documentation
◆ addContact()
| bool tvm::robot::internal::DynamicFunction::addContact | ( | ContactPtr | contact, |
| bool | linearize, | ||
| double | mu, | ||
| unsigned int | nrGen | ||
| ) |
Add a contact to the function
This adds forces variables for every contact point belonging to the robot of this dynamic function.
- Parameters
-
contact Contact that will be added linearize If true, linearize the friction cone using generators mu Friction coefficient nrGen Number of generators for the cone (only applicable when linearize is true)
Returns true if a contact has been added
◆ addContact_()
|
protected |
◆ addPositiveLambdaToProblem()
| void tvm::robot::internal::DynamicFunction::addPositiveLambdaToProblem | ( | ControlProblem & | problem | ) |
Add constraints to the given problem
The constraints express that the contact should not slip, i.e. mu*f_n > ||f_t||, where mu was set when the contact was added.
◆ contactForce()
| sva::ForceVecd tvm::robot::internal::DynamicFunction::contactForce | ( | const Contact::Id & | id | ) | const |
Return the contact force at the contact.
The force is null if this contact has not been added or does not concern the related robot.
◆ getContact() [1/2]
|
protected |
◆ getContact() [2/2]
|
protected |
◆ removeContact()
| void tvm::robot::internal::DynamicFunction::removeContact | ( | const Contact::Id & | id | ) |
Remove a contact
This has no effect if this contact was not added before
◆ updateb()
|
protected |
◆ updateJacobian()
|
protected |
Member Data Documentation
◆ contacts_
|
protected |
◆ robot_
|
protected |
The documentation for this class was generated from the following file:
- include/tvm/robot/internal/DynamicFunction.h
