geometricdata.hh File Reference
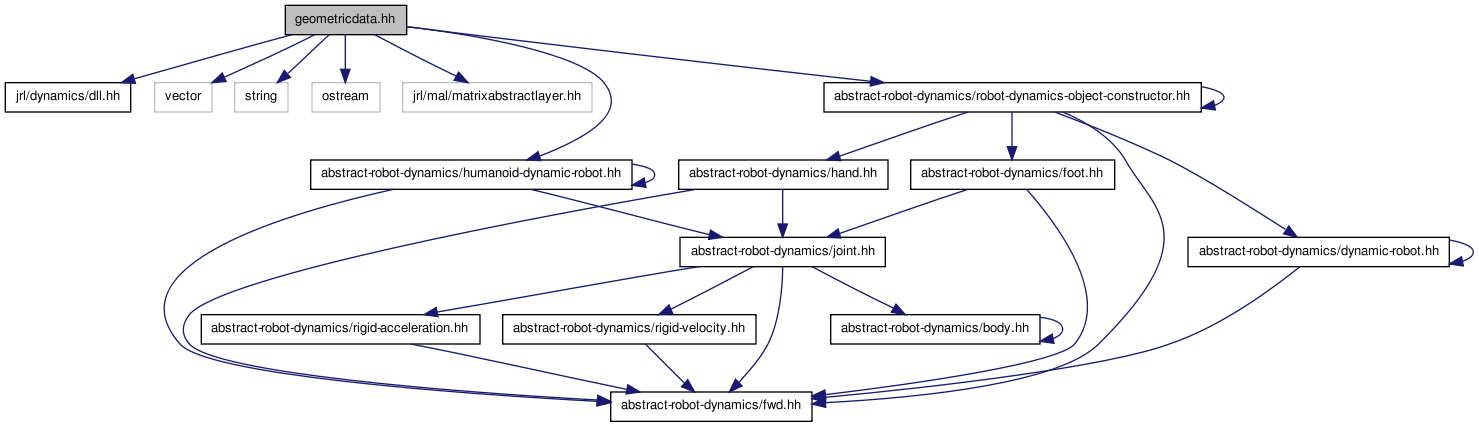
#include "jrl/dynamics/dll.hh"#include <vector>#include <string>#include <ostream>#include <jrl/mal/matrixabstractlayer.hh>#include "abstract-robot-dynamics/humanoid-dynamic-robot.hh"#include "abstract-robot-dynamics/robot-dynamics-object-constructor.hh"
Include dependency graph for geometricdata.hh:
This graph shows which files directly or indirectly include this file:
Classes | |
| struct | dynamicsJRLJapan::Geometry::IndexedFaceSet |
| struct | dynamicsJRLJapan::Geometry::Material |
| struct | dynamicsJRLJapan::Geometry::Texture |
| struct | dynamicsJRLJapan::Geometry::TextureTransform |
| class | dynamicsJRLJapan::Geometry::Appearance |
| class | dynamicsJRLJapan::Geometry::Shape |
| class | dynamicsJRLJapan::BodyGeometricalData |
Namespaces | |
| namespace | dynamicsJRLJapan |
| namespace | dynamicsJRLJapan::Geometry |
Defines | |
| #define | _DYNAMICS_JRL_GEOMETRIC_DATA_H_ |
Typedefs | |
| typedef std::vector< int > | dynamicsJRLJapan::Geometry::polygonIndex |
Functions | |
| std::ostream & | dynamicsJRLJapan::Geometry::operator<< (std::ostream &, const Material &) |
Define Documentation
| #define _DYNAMICS_JRL_GEOMETRIC_DATA_H_ |