mc_rtc::Configuration general purpose configurationmc_convex_visualization is a tool that allows you to visualize the convexes of a robot in any mc_rtc GUI application.
The tool is launched as follows:
$ mc_convex_visualization JVRC1
The arguments to the program should be the same as you would use as a MainRobot entry. It can also handle aliases. For example:
# Specify a vector of arguments
$ mc_convex_visualization env `rospack find mc_env_description` ground
# Or an alias
$ mc_convex_visualization env/ground
After launching an mc_rtc GUI, it should look like this:
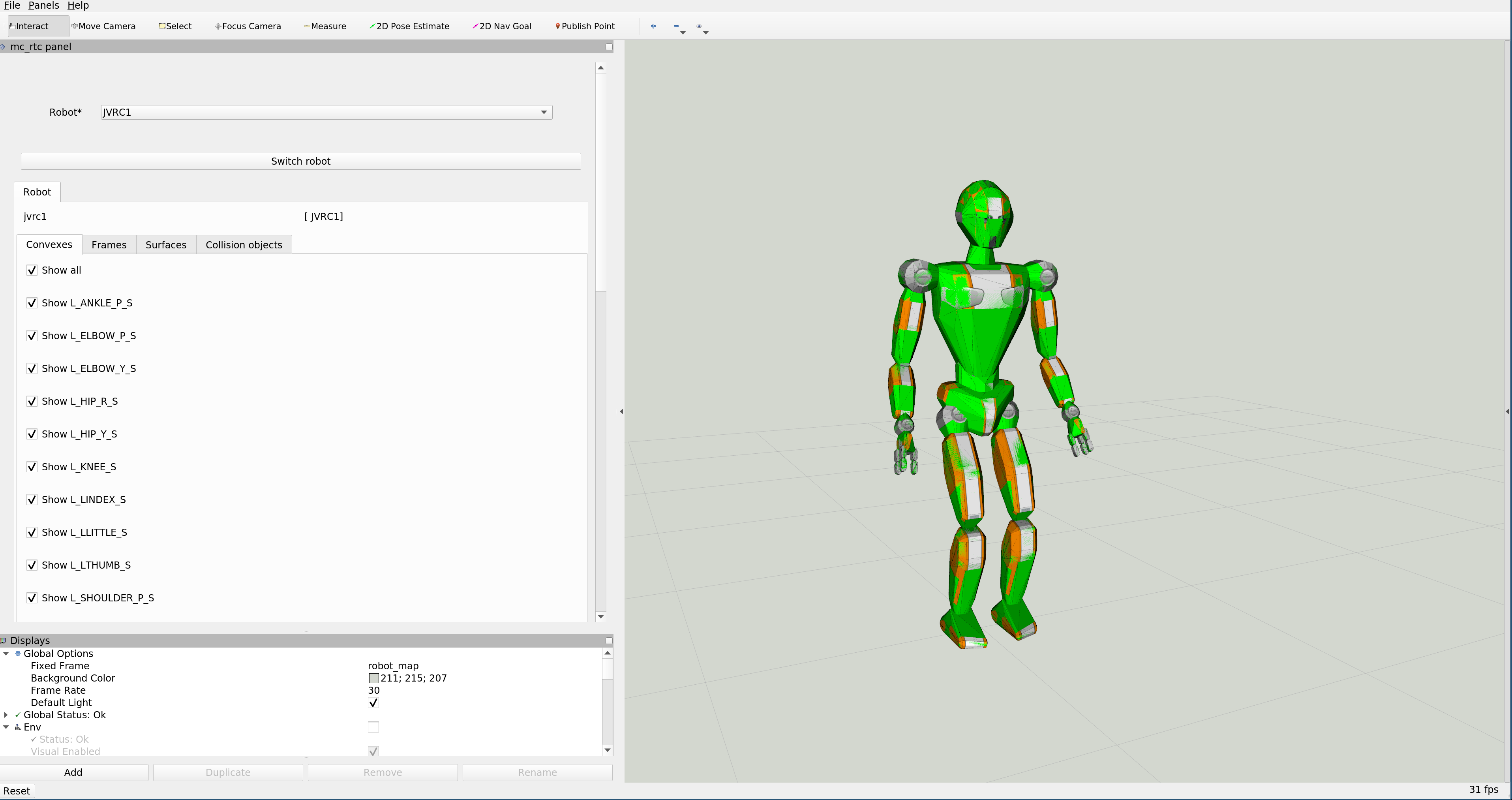
You can easily select which convexes to display through the interface.