robotdynamicsimpl.hh File Reference
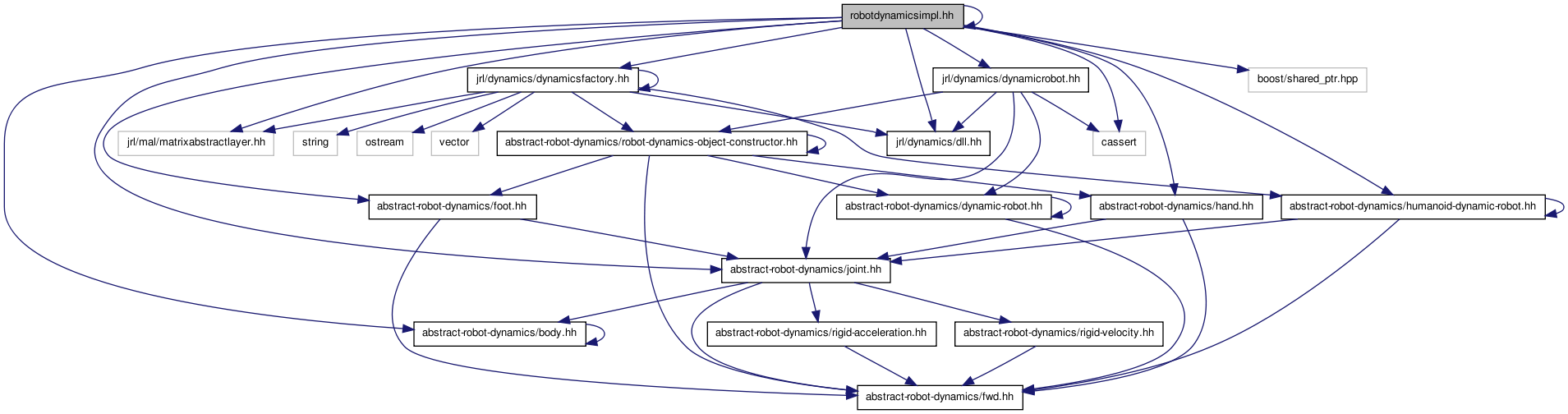
#include <jrl/mal/matrixabstractlayer.hh>#include "jrl/dynamics/joint.hh"#include "boost/shared_ptr.hpp"#include "abstract-robot-dynamics/joint.hh"#include "jrl/dynamics/dll.hh"#include "jrl/dynamics/dynamicrobot.hh"#include "abstract-robot-dynamics/body.hh"#include <cassert>#include <abstract-robot-dynamics/humanoid-dynamic-robot.hh>#include <jrl/dynamics/dynamicsfactory.hh>#include "abstract-robot-dynamics/foot.hh"#include <abstract-robot-dynamics/hand.hh>
Include dependency graph for robotdynamicsimpl.hh:
This graph shows which files directly or indirectly include this file:
Typedef Documentation
| typedef dynamicsJRLJapan::Hand CimplHand |
| typedef dynamicsJRLJapan::Joint CimplJoint |