mc_rtc::Configuration 設定mc_log_visualizationは、ログをRVizで3次元表示するツールです。mc_rtc_rosパッケージに含まれています。
以下のようにリプレイを起動します。
$ roslaunch mc_log_visualization log_visualizer.launch robot:=JVRC1 log:=/tmp/mc-control-MyController-latest.bin
注: ROSの制約により、ログの絶対パスを指定する必要があります。
次に、可視化ツールを起動します。
$ roslaunch mc_rtc_ticker display.launch
以下のようにインターフェイスが表示されます。
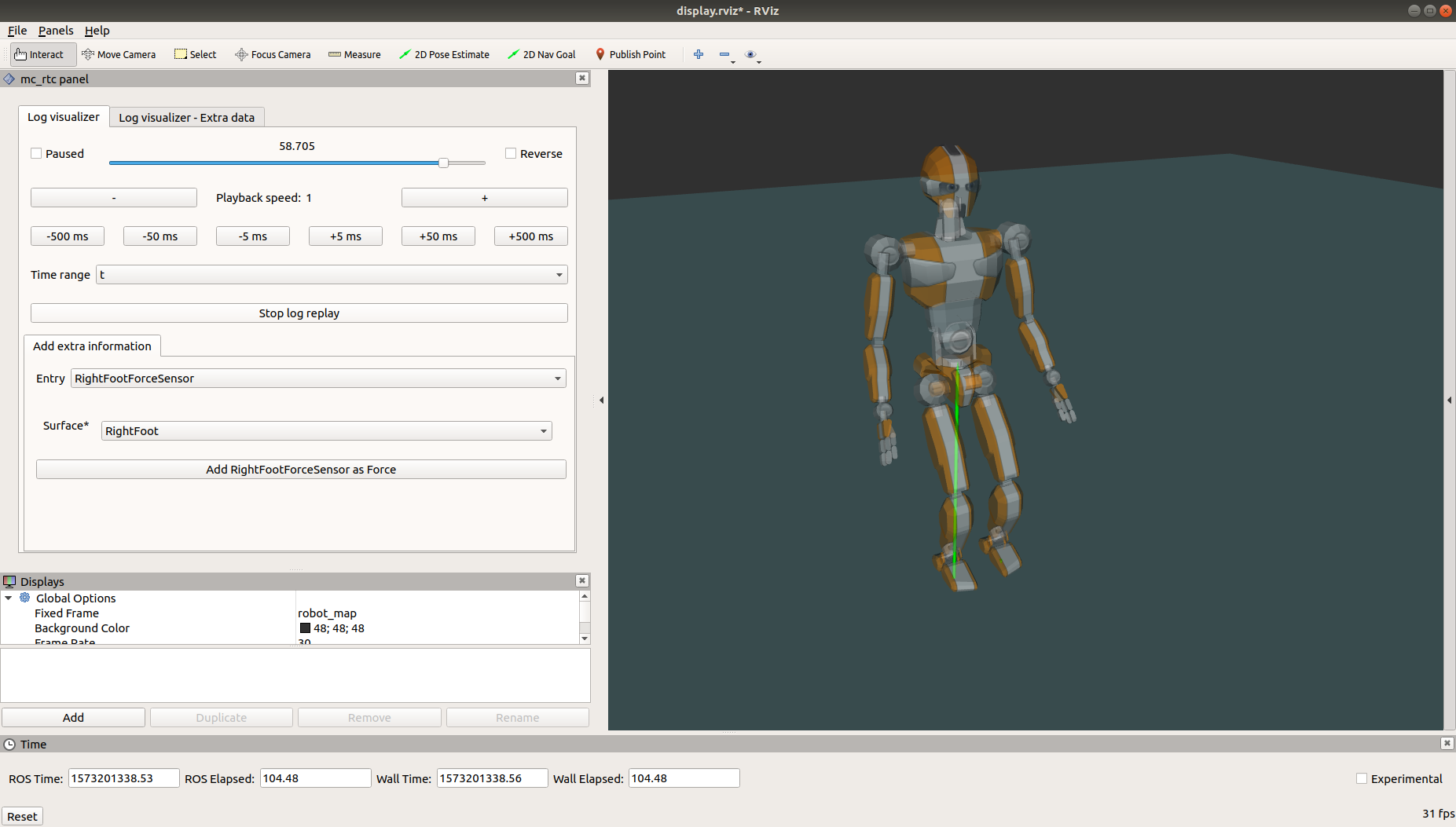
このセレクターでは、可視化したい時間範囲を選択できます。現状では、ログに記録されている時間範囲のみを選択できます。
このメニューでは、補足情報をインターフェイスに追加できます。データがどのように表示されるかは、ログに記録されているデータの形式に基づき決定されます。
データを表示する前に補足情報を指定できる場合もあります。上記のスクリーンショットの場合、RightFootForceSensorエントリが選択されているため、どの表面フレームに力を表示するかを指定できます。
補足情報を追加すると、その情報が3次元環境に表示され(表示可能な場合)、数値データがLog visualizer - Extra dataタブに表示されます。このタブでは、表示されているデータを非表示にすることも可能です。
補足データの選択状態は、ログ可視化ツールを次に起動するときも維持されます。