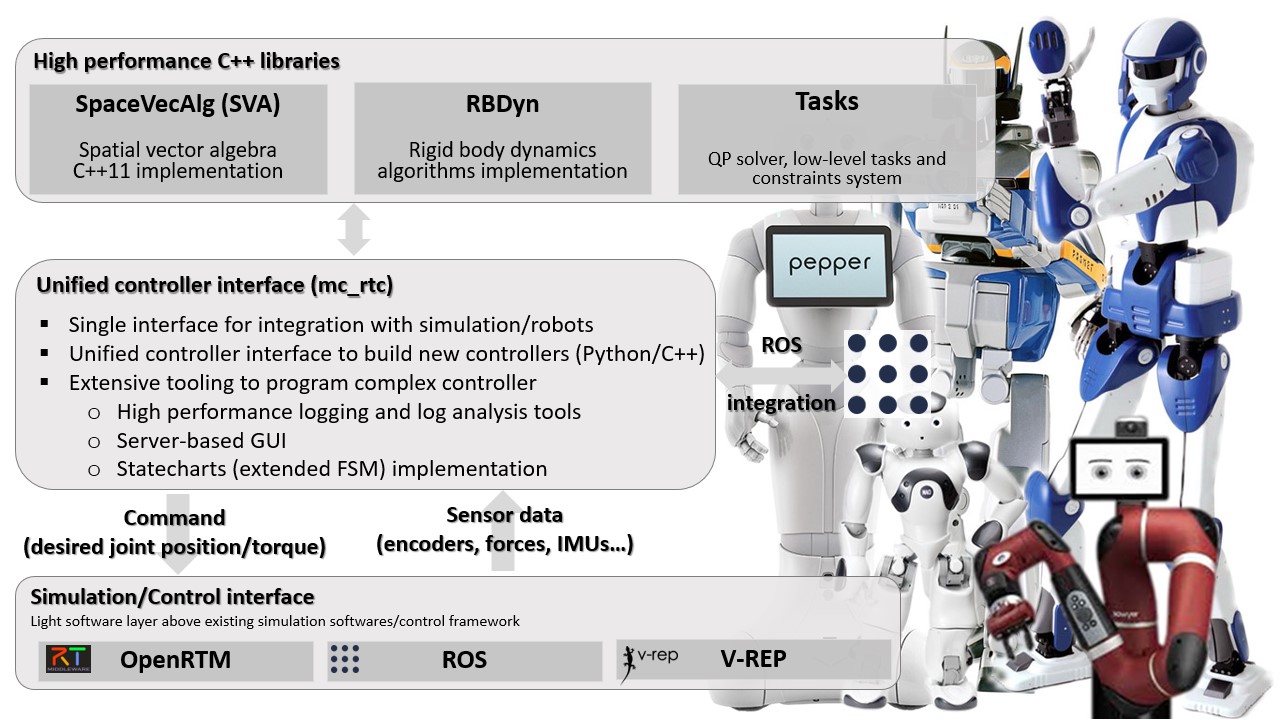
mc_rtc::Configuration 設定mc_rtcは、シミュレーションシステムやロボット制御システムとデータをやり取りするインターフェイスです。これらのシステムは、指定されたロボットの状態(関節の値やセンサーの測定値など)を出力します。一方、mc_rtcは、ロボットの目標状態(コマンド)を出力します。この処理は、mc_control::MCGlobalControllerクラスを通じて実行されます。このクラス自体は制御を行わず、このタスクをmc_control::MCControllerクラスの派生オブジェクトにデリゲートします。mc_rtcフレームワーク内でコントローラーを記述するには、mc_control::MCController基底クラスから派生したクラスを記述し、必要な機能をそのクラスに実装します。後で説明するチュートリアルでは、そうしたコントローラーを実装します。このページのチュートリアルでは、お使いのマシンに本フレームワークをビルド・インストールする方法について説明します。
Homebrewから、最新のUbuntu LTSとmacOSのバイナリ版を提供しています。また、簡単に使用できるUbuntu、macOS、Windows用のソースコード版とvcpkgのレジストリも提供しています。
UbuntuユーザーとmacOSユーザーにはバイナリ版を推奨します。Windowsユーザーにはvcpkgを推奨します。
# ミラーをセットアップする
curl -1sLf 'https://dl.cloudsmith.io/public/mc-rtc/stable/setup.deb.sh' | sudo -E bash
# パッケージをインストールする
sudo apt install libmc-rtc-dev mc-rtc-utils
# ROSディストリビューションのミラーがセットアップされているものと仮定
sudo apt install ros-${ROS_DISTRO}-mc-rtc-plugin ros-${ROS_DISTRO}-mc-rtc-tools# ミラーをセットアップする
curl -1sLf 'https://dl.cloudsmith.io/public/mc-rtc/head/setup.deb.sh' | sudo -E bash
# パッケージをインストールする
sudo apt install libmc-rtc-dev mc-rtc-utils
# ROSディストリビューションのミラーがセットアップされているものと仮定
sudo apt install ros-${ROS_DISTRO}-mc-rtc-plugin ros-${ROS_DISTRO}-mc-rtc-tools注: mc_rtcのディストリビューション版では、eigen-qldを介してQLD QPソルバー(線形二次計画法ソルバー)を使用できます。LSSOLへのアクセス権があり、eigen-lssolをインストールできる場合、LSSOLのサポート付きでTasksをビルドして/usrにインストールできます。この2つのバージョンはバイナリレベルで互換性があります。
公式のインストール手順に従ってHomebrewをインストールしてください。その後、以下のコマンドを実行してください。
brew tap mc-rtc/mc-rtc
brew install mc_rtcvcpkgのインストール手順に従って、お使いのシステムにvcpkgをインストールしてください。
その後、vcpkgのバイナリまたはvcpkg.jsonマニフェストと共にvcpkg-configuration.jsonファイルを作成し、レジストリをセットアップしてください。
{
"registries": [
{
"kind": "git",
"baseline": "{下記を参照}",
"repository": "https://github.com/mc-rtc/vcpkg-registry",
"packages": [ "libnotify", "hpp-spline", "ndcurves", "tvm",
"spacevecalg", "rbdyn", "eigen-qld", "sch-core", "tasks",
"mc-rbdyn-urdf", "mc-rtc-data", "eigen-quadprog", "state-observation",
"mc-rtc" ]
}
]
}ここで、baselineには、mc-rtc/vcpkg-registryの最新のコミットハッシュを指定してください。
以下のいずれかの方法を選択できます。
vcpkgコマンドを使用してmc_rtcをインストールする: vcpkg install mc_rtcvcpkg.jsonファイル)内でmc_rtcパッケージを指定する{
"name": "my-package",
"version-string": "1.0.0",
"homepage": "https://my.home",
"description": "パッケージの説明",
"dependencies": [
"mc-rtc"
]
}mc-rtc-superbuild はCMakeを用いて作られたmc_rtcのインストールに必要なソフトウェア及びmc_rtcをインストールするためのツールです。加えて、mc_rtcを必要とするプロジェクトをビルドできるようにするための拡張機能も備えています。
使用方法についてはプロジェクトのホームページを参照して下さい。
以下のインストール方法も利用可能ですが、これらは現在サポートされていません。
mc_rtcのインストールが完了したら、次のセクションに進んでください。